Digite uma palavra ou frase em qualquer idioma 👆
Idioma:
Tradução e análise de palavras por inteligência artificial ChatGPT
Nesta página você pode obter uma análise detalhada de uma palavra ou frase, produzida usando a melhor tecnologia de inteligência artificial até o momento:
- como a palavra é usada
- frequência de uso
- é usado com mais frequência na fala oral ou escrita
- opções de tradução de palavras
- exemplos de uso (várias frases com tradução)
- etimologia
O que (quem) é ГИДРОЛОКАТОР - definição
СРЕДСТВО ЗВУКОВОГО ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ
Асдик; Сонар; Гидролокация; Эхолот; Гидроакустическая станция; Гидроакустический комплекс; Акустик


![Рубка гидроакустика на подводной лодке [[С-56]] ([[корабль-музей]] во [[Владивосток]]е)](https://commons.wikimedia.org/wiki/Special:FilePath/С-56 рубка акустика.JPG?width=200 "Рубка гидроакустика на подводной лодке [[С-56]] ([[корабль-музей]] во [[Владивосток]]е)")
Гидролокатор
(от Гидро... и лат. loco - помещаю)
гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов. Кроме расстояния до погруженного в воду объекта, некоторые Г. определяют также его глубину погружения по наклонной дальности и углу направления на объект в вертикальной плоскости. О методах определения Г. местоположения объекта и о применении Г. см. в ст. Гидролокация.
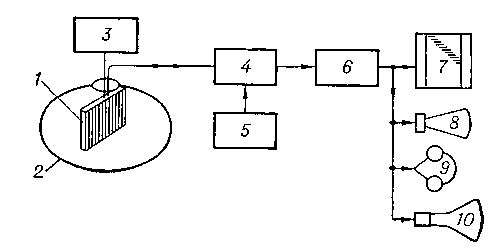
Работа Г. (рис.) происходит следующим образом. Импульс электрического напряжения, выработанный генератором, через переключатель "приём - передача" подаётся к электроакустическим преобразователям (вибраторам), излучающим в воду акустический импульс длительностью 10-100 мсек в определенном телесном угле или во всех направлениях. По окончании излучения вибраторы подключаются к гетеродинному усилителю для приёма и усиления отражённых от объектов импульсных акустических сигналов. Затем сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электроннолучевую трубку (ЭЛТ). На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние (дистанция) до объекта; с помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются, по максимуму звучания определяется пеленг; на ЭЛТ высвечивается сигнал от объекта и измеряется дистанция до него и направление (пеленг). Длительность паузы между соседними посылками импульсов составляет несколько сек.
По способу поиска объекта различают Г. шагового поиска, секторного поиска и кругового обзора. При шаговом поиске и пеленговании по максимуму сигнала акустическую систему поворачивают в горизонтальной плоскости на угол 2,5-15°, делают выдержку (паузу), равную времени прохождения импульсом пути от Г. до объекта, находящегося на максимально возможной дальности, и от объекта до Г., а затем производят следующий поворот. При пеленговании фазовым методом акустическую систему выполняют в виде двух раздельных систем, переключаемых бесконтактным коммутационного устройством из режима излучения в режим приёма и обратно. Суммарные и разностные сигналы, снятые с двухканального компенсатора, после усиления и сдвига по фазе подводятся к ЭЛТ и рекордеру, где отсчитывается дистанция. Этот способ характеризуется сравнительно высокой точностью пеленгования, большим (несколько мин) временем обследования водного пространства и возможностью слежения лишь за одним объектом. При секторном поиске акустическая энергия излучается одновременно в определенном секторе, а приём и пеленгование отражённых сигналов производятся при быстром сканировании характеристики направленности в пределах этого сектора. При наиболее распространённом круговом обзоре осуществляют ненаправленное (круговое) излучение и направленный (в пределах узкой вращающейся диаграммы направленности) приём, что обеспечивает обнаружение и пеленгование всех окружающих Г. объектов. Акустическая система (антенна) такого Г. выполняется в виде цилиндра или сферы, состоящих из большого количества отдельных вибраторов, и размещается в подъёмно-опускном устройстве или в стационарном обтекателе. К преимуществам этого способа относятся быстрое обследование всего горизонта, возможность обнаруживать и следить за несколькими объектами.
Большинство Г. работает в звуковом и ультразвуковом диапазонах частот (4-40 кгц). Это обусловлено необходимостью получения острой направленности антенны (при относительно небольших её размерах) и достижения заданной разрешающей способности. Г. различного назначения обладают дальностью действия от сотен метров до десятков километров и обеспечивают точность пеленгования около 1°. Для уменьшения неблагоприятного влияния гидрологических факторов (см. Гидроакустика) на дальность действия применяют Г. с акустической системой, помещенной в контейнер, буксируемый кораблём на глубине несколько десятков м (Г. с переменной глубиной погружения).
С. А. Барченков.
Блок-схема гидролокатора: 1 - акустическая система; 2 - обтекатель; 3 - поворотное устройство; 4 - коммутационное устройство; 5 - импульсный генератор; 6 - усилитель; 7 - рекордер; 8 - электродинамический громкоговоритель; 9 - телефоны; 10 - отметчик (электроннолучевая трубка).
ГИДРОЛОКАТОР
(сонар), аппаратурный комплекс для определения с помощью акустических сигналов положения подводных и плавучих объектов (первоначально этот термин использовался применительно к эхолокационным приборам для обнаружения подводных лодок, теперь употребляется в более широком значении). Главными элементами гидролокатора являются подводный излучатель мощного акустического сигнала и чувствительный приемник, реагирующий даже на слабые отражения этого сигнала от погруженных в воду объектов. Конструируются оба эти элемента с таким расчетом, чтобы их компоновка в локаторе обеспечивала определение направления на отражающий объект и расстояния до него. На подводных лодках и надводных судах гидролокаторы служат основными - а зачастую и единственными - средствами сбора информации об условиях и обстоятельствах под морской поверхностью. На атомных подводных лодках специальные гидролокаторы применяются в качестве навигационных приборов. Крупные корабли оснащаются эхолотами - гидролокаторами, измеряющими глубину океана. На многих рыбопромысловых судах гидролокаторы используют для обнаружения рыбных косяков; биологи, занимающиеся морскими животными, с помощью гидролокаторов изучают звуки, издаваемые представителями морской фауны.
Под водой акустический пучок, подобно лучу прожектора или радара в воздухе, наводится на цель, и отраженная от нее звуковая энергия поступает в приемник. Из сонара, как из радара, излучение испускается короткими импульсами. Расстояние до цели определяется как произведение скорости звука в воде на половину временного интервала между испусканием импульса и прибытием его эха. Поскольку приемная антенна сонара имеет острую диаграмму направленности, пеленг цели определяется поворотом микрофона при его настройке на эхо. На практике оператор следит за световыми метками на панорамном экране, которые соответствуют обнаруженным объектам, и это значительно облегчает их локацию. Дальность действия гидролокатора ограничена радиусом в несколько километров. Скорость звука в воде равна приблизительно 1,5 км/с, поэтому гидролокационный поиск гораздо медлительней радиолокационного или светового поиска в атмосфере. Из-за относительно большой длины волны звука у гидролокатора довольно слабое пространственное разрешение: там, где глаз различал бы каждую заклепку на корпусе корабля, сонар "увидит" только все судно как единое пятно. К тому же морская вода - далеко не идеальная среда для распространения звука.
Идея гидролокатора не нова. Еще во время Первой мировой войны гидрофоны применялись на надводных кораблях и подводных лодках для обнаружения вражеских судов методами пассивной шумопеленгации. Позже были созданы пьезоэлектрические преобразователи и электронные усилители сигналов звукового диапазона, что привело к развитию систем активной гидролокации. С тех пор разработано много видов совершенных приборов, среди них гидролокатор кругового обзора, гидролокатор переменной глубины и др.
Устройство гидролокатора. Гидролокаторы делятся на два основных типа: активные (излучающие сигнал и принимающие его отражение) и пассивные (принимающие шумы, издаваемые целью). Рассмотрим здесь блок-схему активного гидролокатора кругового обзора (рис. 1).
Преобразователь представляет собой устройство, в котором электрическая энергия преобразуется в механическую и наоборот. Такими преобразователями являются, например, микрофоны и громкоговорители. В гидролокаторе преобразователь исполняет обе функции. Обычно он размещается на днище надводного корабля и в верхней части корпуса подводной лодки. Иногда преобразователями служат пьезоэлектрические кристаллы (они меняют свои размеры при подаче на них электрического напряжения либо меняют форму при воздействии внешних сил, и на их поверхности возникает разность электрических потенциалов), но в данной схеме используется магнитострикционный (одновременно магнитоупругий) элемент - никелевый стержень с намотанной на него проволочной катушкой индуктивности. При нарастании электрического тока в катушке возникает магнитное поле, сжимающее стержень, при убывании тока - поле, растягивающее его. На конце стержня закреплена диафрагма, соприкасающаяся с водой, поэтому при сокращениях и удлинениях стержня в воде возбуждаются упругие колебания - звуковые волны. По прибытии эха все происходит в обратном порядке, и движения диафрагмы возбуждают ток в катушке. Набор таких преобразователей располагается по кругу в горизонтальной плоскости; каждый из них ориентирован в своем направлении. Передатчик воздействует на все преобразователи одновременно, и звуковые волны уходят сразу во всех направлениях. Но каждый преобразователь соединен с приемником отдельно, поэтому направление на цель определяется по тому элементу, который "слышит" эхо.
Передатчик. Оператор сидит за пультом управления, контролируя работу передатчика - мощного генератора ультразвуковых импульсов (средняя мощность типичного передатчика - ок. 8 кВт, пиковая в импульсе достигает 160 кВт). Несущая частота передатчика фиксирована ок. 20 кГц, а длительность импульса может меняться оператором от 0,005 до 0,1 с. Частота повторения импульсов тоже может варьироваться от 1 до 60 имп/мин - в зависимости от максимальной величины радиуса зоны обзора (все эхо-сигналы должны быть приняты до момента посыла следующего импульса). Выбор частоты передатчика зависит от нескольких величин, влияние которых противоположно: с увеличением частоты возрастают потери на трассе, но интенсивность принимаемых собственных шумов воды и габариты преобразователя становятся меньше. Из этих соображений наиболее выгодным диапазоном эхолокации является полоса частот от 18 до 24 кГц. Акустические устройства шумопеленгации наиболее эффективно работают на частотах ниже 1 кГц, на которых наиболее мощно излучаются шумы кораблей. Выходная мощность передатчика ограничивается сверху тем ее значением, при котором в воде возникает кавитация (см. КАВИТАЦИЯ). Кавитационные пузырьки незамедлительно отражают в преобразователь существенную долю излучаемой мощности. С увеличением давления (т.е. глубины) возрастает и допустимый предел излучаемой акустической мощности.
Реле приема-передачи. Так как один и тот же преобразователь выступает в роли излучателя и чувствительного элемента, его следует автоматически подключать то к передатчику, то к приемнику.
Приемник. Принимаемые различными чувствительными элементами сигналы раздельно поступают в приемно-усилительный тракт, а оттуда - на коммутатор. В приемном тракте есть специальные схемы подавления паразитных сигналов.
Коммутатор. Здесь принятый сигнал направляется по двум раздельным каналам - слухового контроля и видеоиндикации. Сегменты статора (неподвижной части коммутатора) расположены по кругу; на каждый из них поступает сигнал от определенного преобразователя. Положением первого ротора (с выходом на аудиоканал) управляет оператор, выбирая интересующее его направление прослушивания; гетеродинный конвертер канала слухового контроля переводит принятый сигнал на звуковую частоту 800 Гц и посылает его в головные телефоны оператора. Второй ротор коммутатора, связанный с видеоканалом, вращается с постоянной скоростью 1750 об/мин синхронно с разверткой индикатора кругового обзора, подобно тому как это делается в радаре, и позволяет визуализировать каждый эхо-сигнал с его пеленгом. За время между посылами двух последовательных импульсов зондирования развертка совершается дважды, так что все принятые отражения выводятся на экран индикатора (рис. 2).
Регистрирующий индикатор кругового обзора. Представляет собой электронно-лучевую трубку с круговой разметкой экрана, на котором отмечаются все обнаруженные объекты вблизи производящего гидролокацию корабля (ему соответствует круговое пятно в центре экрана). Поскольку отражения от более удаленных целей принимаются позже, развертка ведется по разворачивающейся спирали со скоростью 1 оборот в 1/1750 мин, и на том месте экрана, которое соответствует положению цели, возникает яркое световое пятно. Вращающаяся визирная линия и круговая шкала в 360. позволяют оператору определять истинный пеленг каждой цели. Кроме того, на экране имеется индекс дальности - маленькое световое пятно, которое оператор может вводить на экран для совмещения с изображением цели. Этот индекс связан с автоматическим счетчиком, вычисляющим расстояние до объекта. Выделяя на коммутаторе интересующее его направление, оператор по каналу слухового контроля оценивает характер конкретного эха и его происхождение - от косяка ли рыбы или подводной лодки, либо в результате подводной реверберации. Заодно можно оценить и направление движения цели, так как частота звука от приближающегося объекта выше, а от удаляющегося - ниже. См. также ДОПЛЕРА ЭФФЕКТ
.
.
Блок обработки данных, куда поступает вся первичная информация о цели, вносит поправки с учетом условий распространения звука и движения самого судна с гидролокатором и выдает результаты расчетов дальности, пеленга, курса и скорости цели (необходимые, например, при наведении орудий боевого корабля).
Гидролокационные устройства. Гидрофоны представляют собой подводные аналоги микрофонов и используются при прослушивании шумов, исходящих от цели. На подводных лодках они служат средствами поиска и обнаружения противника чаще, чем гидролокаторы активного типа, так как при излучении локационного сигнала подводная лодка может обнаружить себя. Гидрофоны размещают по дну на входе в гавань; от них по кабелям сигналы поступают на наземные станции обработки, благодаря чему осуществляется постоянный контроль движения надводных и подводных судов в районе порта. Гидрофоны имеют ограниченные возможности, т.к. с их помощью нельзя непосредственно определить удаленность объекта; можно лишь установить направление на него.
Гидролокатор с острой диаграммой направленности, излучая сигналы и принимая их отражения, обнаруживает цели и измеряет их дальности и пеленги. Поиск ведется последовательными шагами: оператор наводит преобразователь на заданное направление, посылает импульс и ждет его отражение; потом переходит на другой пеленг и повторяет все снова - и так до тех пор, пока не проверит всю зону обзора.
Гидролокатор кругового обзора дает результаты гораздо быстрее (он рассмотрен выше при описании блок-схемы рис. 1).
Аппаратура для определения глубины погружения цели работает совместно с активным гидролокатором, поскольку не имеет своего передатчика и лишь воспринимает отражения сигналов, испущенных активным прибором. Набор остронаправленных преобразовательных элементов этой аппаратуры имеет вид вертикальной линейки, сканируя которую получают в угловой мере данные о погружении цели; эта информация в совокупности с результатами измерений традиционных угломерных приборов позволяет определить глубину и дальность цели.
Опускаемый с вертолета гидролокатор представляет собой преобразователь сферической формы, который спускается на длинном кабеле и погружается в воду при зависании вертолета; верхний конец кабеля соединен с бортовой аппаратурой. Такой гидролокатор служит для экстренного ненаправленного прослушивания эхо-сигналов в заданном районе.
Береговая станция акустической пеленгации и обработки эхо-сигналов получает информацию от системы погруженных в различных местах гидрофонов, определяет пеленги удаленных объектов и расстояния до них.
Гидролокатор переменной глубины, подобно вертолетному прибору, погружается на кабеле (но с борта надводного корабля и для решения иных задач) глубже сильно искажающего процесс распространения звуковых волн термоклина (слоя воды в океане с большим градиентом температуры), чем исключаются рефракционные потери при определении дальности объекта.
Гидроакустические радиобуи - система плавучих устройств, каждое из которых несет на себе гидрофон и радиопередатчик индивидуальной частоты. Разбросанные с самолета в заданном районе, они посылают сигналы о присутствии, например, подводной лодки, сопоставление которых дает информацию о приблизительном ее местонахождении.
Эхолот является упрощенным вариантом гидролокатора с острой диаграммой направленности, ориентированной на морское дно. Временная картина отраженных от дна звуковых сигналов автоматически регистрируется в цифровой или аналоговой форме (или в обеих одновременно) на карте.
Гидроакустический телефон - своеобразный подводный аналог радиотелефона. Промодулированные голосом импульсы на ультразвуковой несущей частоте распространяются в воде и принимаются судном, где они детектируются и подаются в телефонную трубку. Такая система используется для связи подводных лодок между собой и с надводными кораблями.
Береговая система дальнего обнаружения судов, терпящих бедствие (т.н. система СОФАР), функционирует благодаря сверхдальнему распространению звука (до нескольких тысяч километров от источника) по подводному звуковому каналу (см. ниже). Если в звуковом канале взорвать заряд, то по звуковому импульсу можно определить положение его источника, измеряя разность времен прихода импульсов, принятых ненаправленными приемниками в трех далеко отстоящих друг от друга пунктах. Бомбами для подачи подобных сигналов бедствия снабжаются подводные лодки и надувные спасательные плоты.
Акустические системы самонаведения торпед являются по сути активными или пассивными гидролокационными устройствами для обнаружения и преследования цели; порой они оснащены и неконтактными гидроакустическими взрывателями.
См. также:
гидролокатор
м.
Прибор для гидролокации.
Прибор для гидролокации.
Wikipédia
Гидролокатор

Гидролока́тор, сона́р (англ. sonar, аббр. от SOund Navigation And Ranging) — средство звукового обнаружения подводных объектов с помощью акустического излучения.

Exemplos do corpo de texto para ГИДРОЛОКАТОР
1. Гидролокатор не давал показания на цель, но экран засвечивался.
2. Сначала под воду опустили гидролокатор, включили судовой эхолот.
3. Сейчас закупают гидролокатор бокового обзора, подводные фотокамеры и снаряжение для проведения подводных наблюдений, современный оптический микроскоп.
4. Геофизические обследования (источник звуковых колебаний, гидролокатор, электроискровой морской сейсмический источник, датчик регистрации слабых сейсмических сигналов); 6.
5. В этом году участники экспедиции использовали подводный буксируемый гидролокатор и судовой эхолот.